Inspiring innovation, teamwork, and a passion for STEM through the challenges of robotics. Built with precision. Driven by purpose.
Home
Spreading the Joy of Robotics
Leviathan Robotics is a community-based robotics club founded by students at Saratoga High School, dedicated to innovation, teamwork, and engineering excellence.
Mission
Building More Than Robots
Founded in 2024, our team is committed to exploring the exciting world of robotics through hands-on learning, innovation, and teamwork. Our mission is to build and program robots and inspire and share the joy of robotics with our school and the wider community. We aim to create an inclusive environment where students of all skill levels can come together, collaborate, and discover the endless possibilities that robotics offers.
Values
Creativity & Collaboration
At Leviathan Robotics, we foster creativity, problem-solving, and critical thinking while emphasizing the importance of perseverance and collaboration. We believe that by building robots, we are developing technical skills and learning how to work effectively as a team, adapt to challenges, and think outside the box.
Impact
Inspiring the Future
Whether it's competing in local or national robotics competitions, hosting workshops, or participating in community outreach, we are dedicated to making robotics accessible and enjoyable for everyone. Through our work, we hope to spark curiosity, inspire the next generation of engineers, and contribute to a future where robotics plays a key role in shaping the world.
Sustainability
SustainPrint™
Sustainability is at the core of everything we build. Through our SustainPrint™ initiative, we reuse and repurpose materials across robot iterations, minimize waste during prototyping, and prioritize energy-efficient designs. We recycle electronic components and educate our community on sustainable practices in STEM — proving that innovation and environmental responsibility go hand in hand.
At a Glance
Our Team
7
Team Members
8
Sponsors
45,000+
People Reached
3
Robot Versions
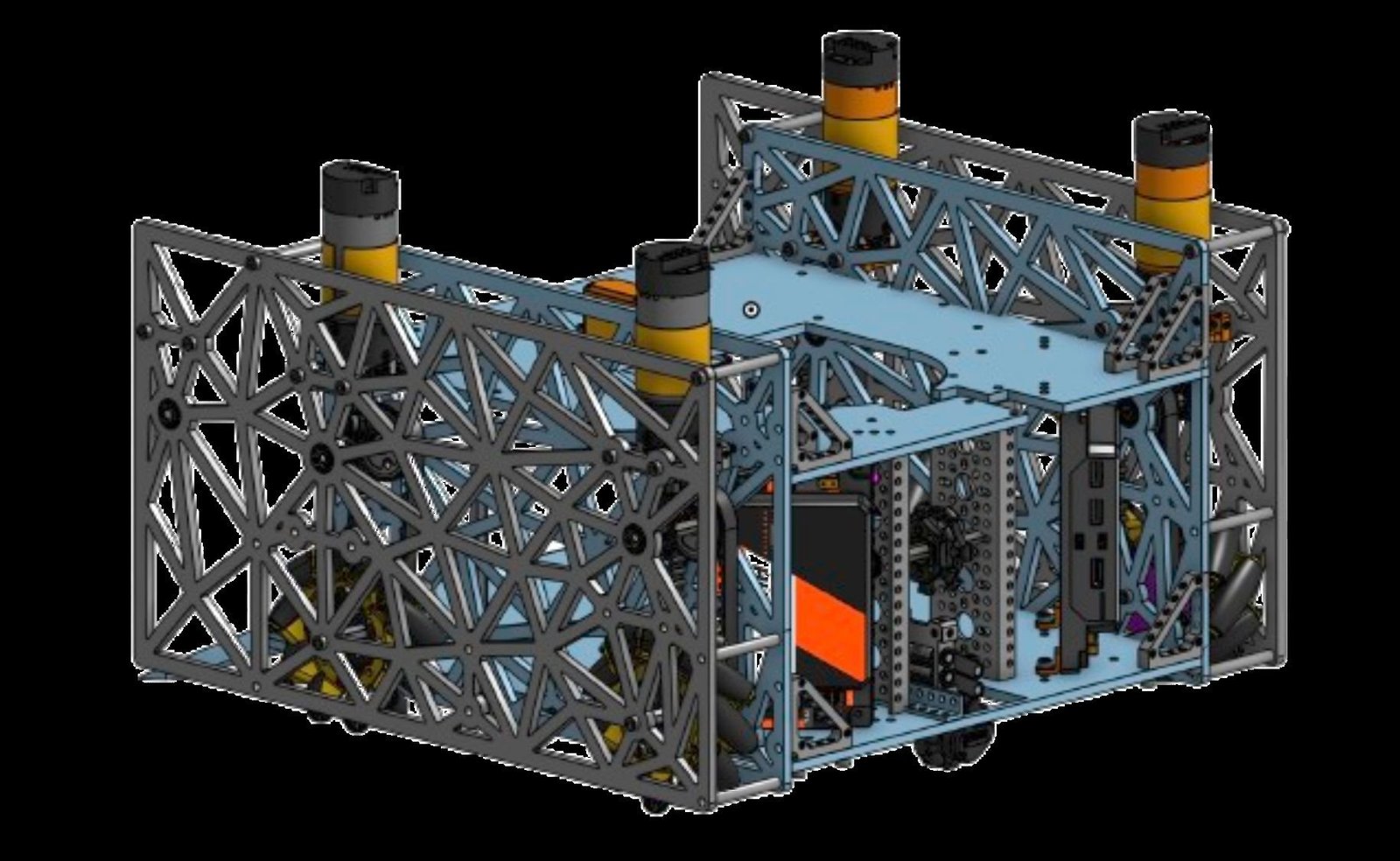
Our Robot
Engineering Excellence
Hardware, software, and autonomous systems — built with precision across every season.
Our Robot
Design Process
A rigorous, iterative approach from concept to competition-ready robot.
1
Brainstorm
Discuss high-level design and identify major subsystems
2
Design
Create effective prototypes with full CAD models
3
Prototype
Laser-cut wood & 3D-printed parts to evaluate ideas
4
Build & Test
Custom-cut metal and high-quality 3D prints
5
Improve
Refine for performance, speed, and reliability
Our Robot
Hardware
Drivetrain
Vertical Drivetrain
By choosing a vertical drivetrain, we made the robot compact enough to fit a spindexer inside the drivetrain while staying within the 16" x 16" endgame square and 18" height limit.
Bevel-gear and vertical-motor design for seamless spindexer integration
Two odometry pods at center for optimal localization
Compact form factor with base-level spindexer
Tradeoff
Vertical motors make turret integration more difficult
Solution
Developed innovative inverted turret layout to recover critical space
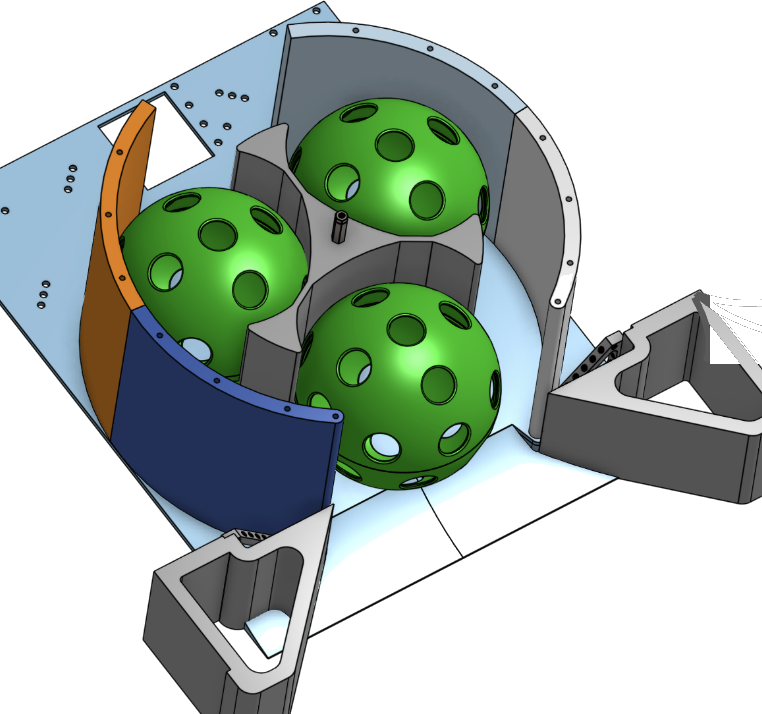
Sorting
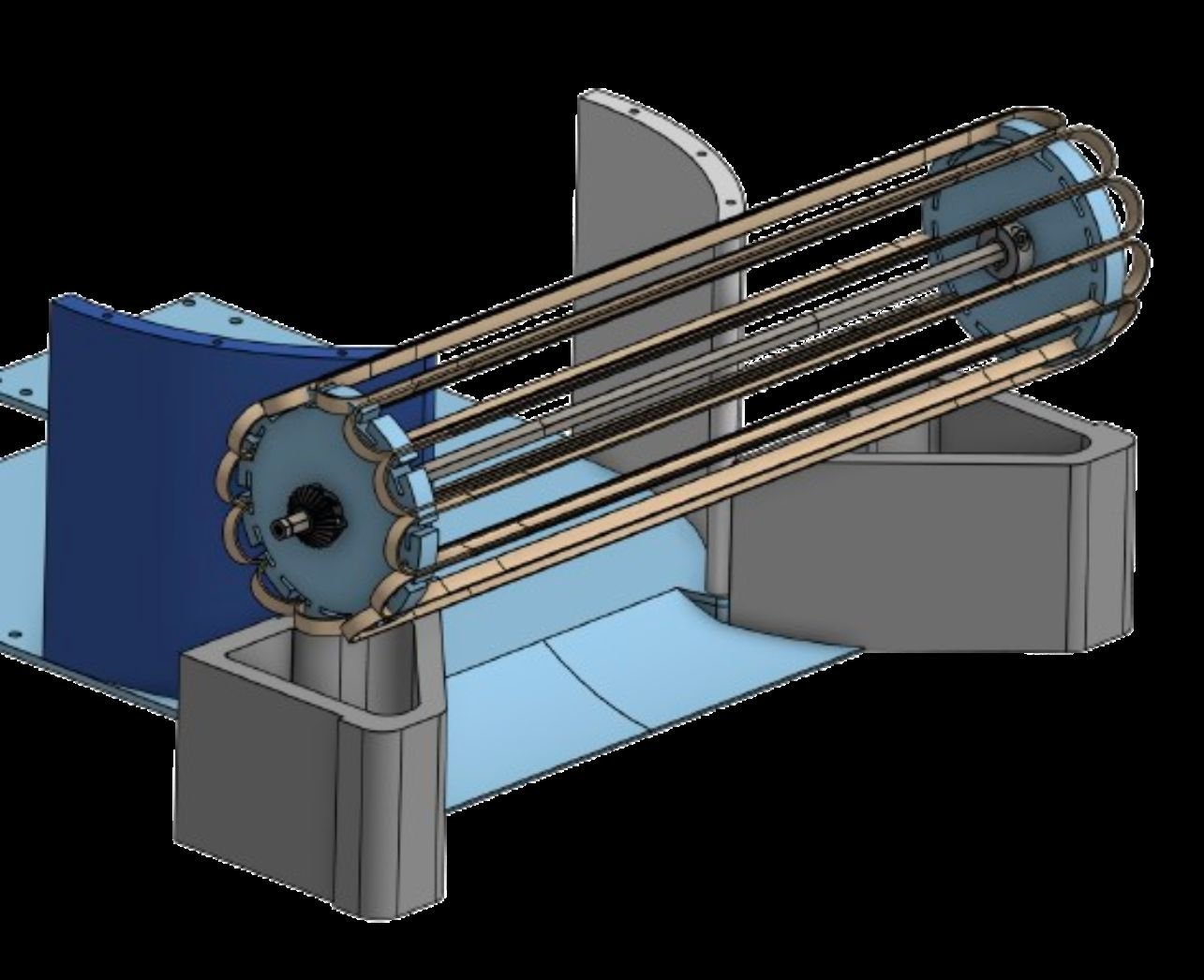
Spindexer
Receives up to three artifacts from the intake, sorts them according to the required game pattern, and smoothly transfers them to the flywheel using an omni wheel.
Solid, smooth interior walls to reduce snag points
Enlarged spinner with extended arms for maximum grip
Mounts both Control Hub and Expansion Hub along its side
Problem
Artifacts got stuck on standoffs; spinner had minimal contact
Solution
Replaced standoffs with solid walls; enlarged spinner diameter
Aiming
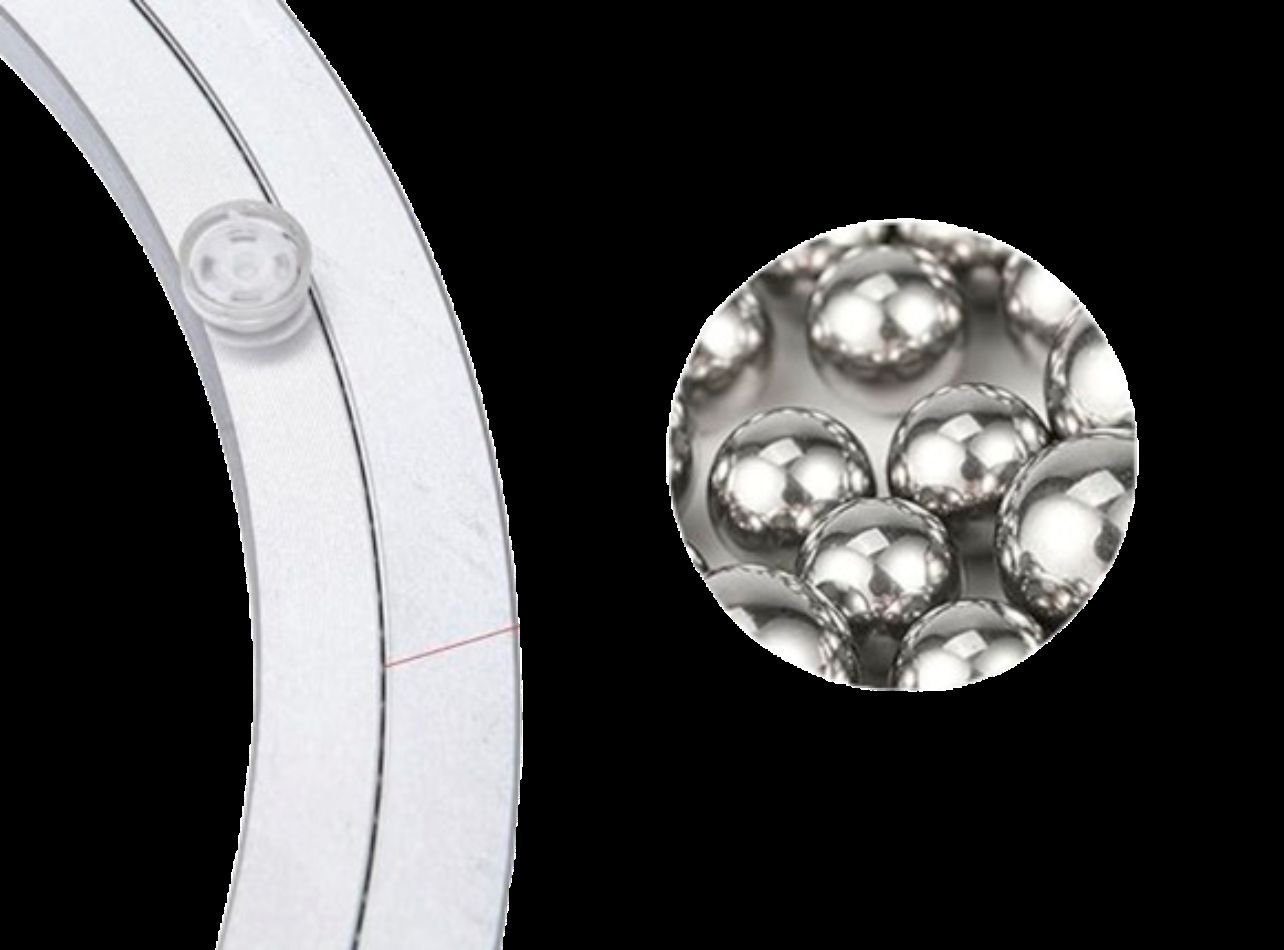
Turret
Enables high-speed rotation through a belt drive, maintains flush alignment with the flywheel, and provides precise motor-controlled operation.
Metal ball bearings for 4x faster rotation vs. 3D-printed version
Modularized from flywheel for faster iteration cycles
Innovative attachment points for stability and fast prototyping
Problem
3D-printed turret was slow — couldn't use ball bearings
Solution
Replaced with manufactured turntable bearing turret — 4x faster
Shooting
Flywheel
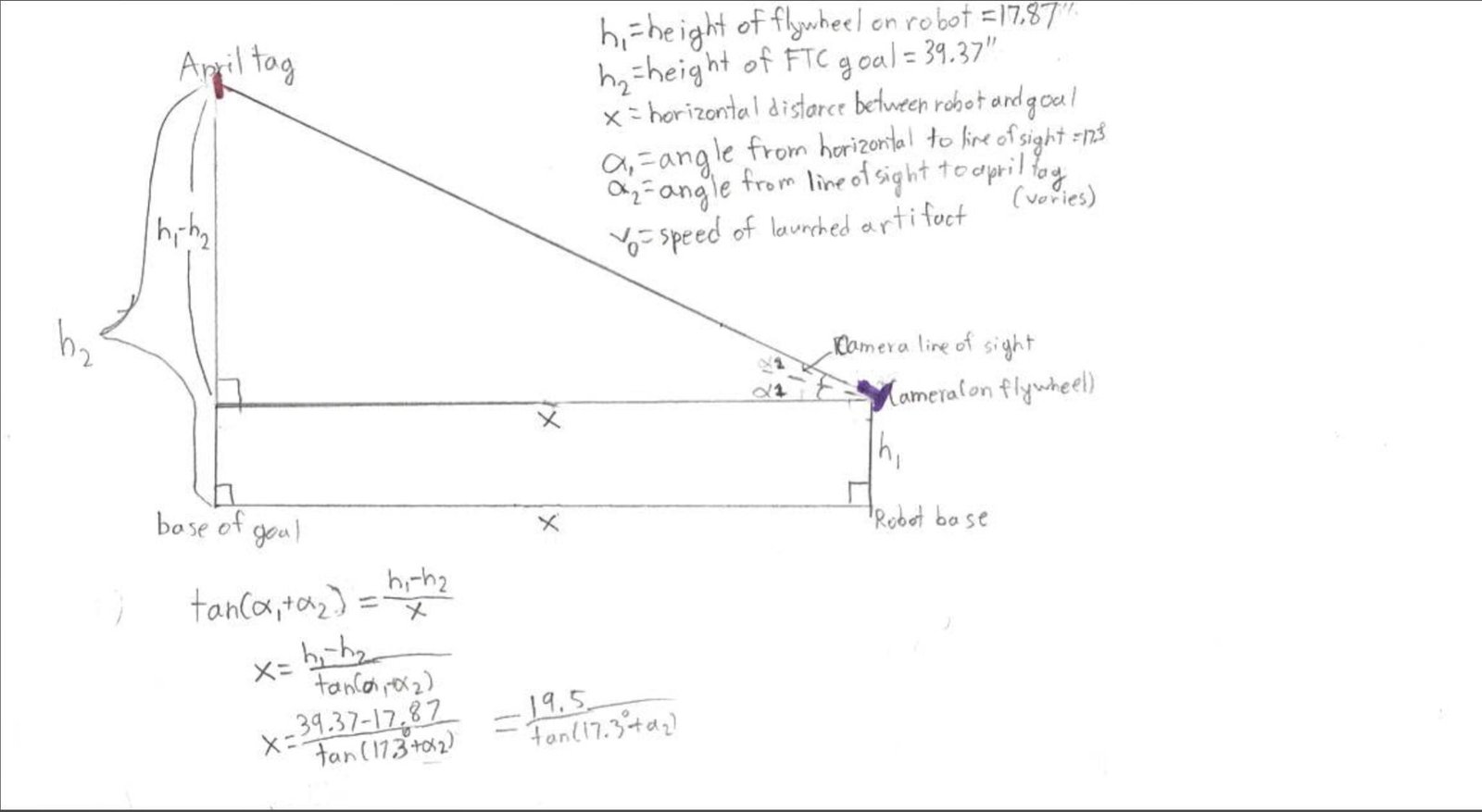
Receives artifacts from the spindexer and shoots them toward the goal. Uses Limelight camera to detect AprilTags for precise targeting.
Calculates distance to goal using camera angle data
Regression model maps speed to shooting distance
Tungsten putty increases inertia for longer shots
Compatible with Limelight 3a and turret system
Collection
Intake
Efficiently intakes artifacts using rubber band roller wheels and a funnel ramp, smoothly channeling them into the spindexer for sorting.
Rubber band wheels provide consistent grip and pull on artifacts
Enlarged funnel ramp design to absorb high-speed impacts
Sandpaper-enhanced surfaces for additional traction
Protective funnel guards against wall and robot collisions
Lesson Learned
Control Hub mounted at 45° inside spindexer caused IMU misalignment, breaking Road Runner odometry
Fix
Relocated Control Hub to vertical mount on top of spindexer, restoring proper odometry
Our Robot
Sensor Suite
Vision
Limelight 3A
Precise aiming via real-time AprilTag detection. Provides autonomous localization and dynamic flywheel speed adjustment using trigonometric distance calculations.
Detection
Color Sensor V3
Detects incoming ball presence and color for automatic sorting during autonomous. Position carefully tuned for consistent detection accuracy.
Tracking
2M Distance Sensor
Detects when a ball leaves the system and updates the ball count. Repositioned upward for longer sampling window to prevent missed detections.
Our Robot
Software
Advanced autonomous navigation, computer vision, and precise motion control power our robot's performance.
Navigation
Road Runner
Road Runner provides precise path planning, generating smooth trajectories during autonomous for predictable robot movement. Combined with sensor data for accurate localization.
Enhanced localization with odometry integration
Auto-correction and real-time path adjustment
Robust recovery when bumped off course
Path Simulation
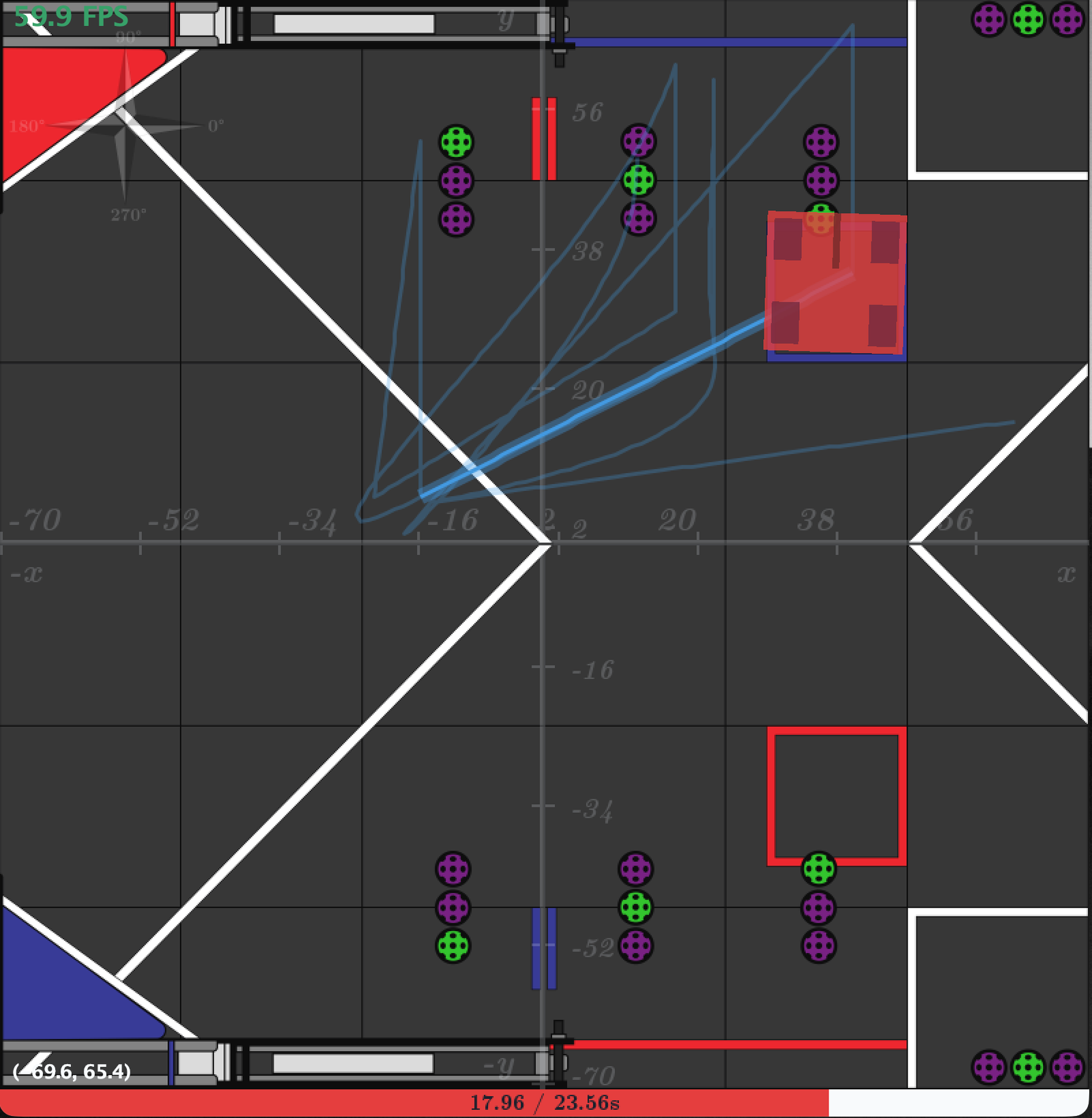
MeepMeep
MeepMeep is a trajectory visualization tool that lets us simulate and debug Road Runner paths before deploying to the robot. By previewing autonomous routines on a virtual field, we iterate faster and catch pathing errors without needing physical test runs.
Real-time 2D field simulation of autonomous trajectories
Rapid iteration on path sequences without robot hardware
Visual debugging of timing, heading, and trajectory conflicts
Seamless integration with Road Runner's path-building API
Challenge
Turning Inconsistencies
Selecting the wrong driving mode (Mecanum Drive vs Programming Board) caused unpredictable turning behavior. After extensive troubleshooting, we learned to correctly switch between modes for consistent performance.
Challenge
Complex Tuning Process
Over 10 hours adjusting nearly 40 variables with extreme values. Added teammates to reset the robot each cycle and used Desmos to visualize equations, significantly streamlining the process.
Computer Vision
AprilTag Detection & Distance Modeling
The Limelight 3A provides real-time target alignment by detecting AprilTags on the goal. Our software calculates exact distance using camera angle data, then uses a regression model to determine optimal flywheel speed.
Trigonometric distance calculation from camera angles
Regression-based speed-to-distance mapping
Vision-based failsafe for odometry drift correction
Our Robot
Sensor Fusion
Multiple sensor inputs combine for reliable autonomous performance.
Odometry
Dual Odometry Pods
Two pods at the robot's center provide optimal placement for accurate localization, working with Road Runner's path correction algorithms.
Color Sorting
Autonomous Ball Sorting
Color Sensor V3 detects incoming ball color and triggers automatic sorting logic during autonomous, allowing the spindexer to arrange artifacts in the required pattern.
Redundancy
Vision-Based Fallback
Limelight serves as a redundancy system, providing vision-based targeting as a failsafe to correct positional errors from odometry drift.
Our Robot
Robot Progression
Winter — Play Space Qualifier
Version 1
Enclosed spindexer for sorting, simple flywheel for close-range shots. Featured tungsten putty inside flywheel to increase inertia for faster, further shooting.
January — Santa Clara Qualifier
Version 2
Added belt-driven turret with stacked bearings and 3D-printed base. Mounted Limelight 3A camera on flywheel for optimal height and turret compatibility.
March — NorCal Regionals
Version 3
Upgraded to manufactured turntable turret with metal ball bearings for reduced friction. Slimmed spindexer walls for smoother rotation. Competition-ready build.
Outreach
Spreading FIRST
Connecting with communities locally and internationally to inspire the next generation of innovators.
45,000+
Total People Reached
$3,500
Raised via Summer Camp
100+
Hours Recycling Filament
5
Countries Reached
Event
Argonaut Science Fair
Partnered with Argonaut Elementary School to showcase our robot, introducing the FIRST programs and promoting FIRST values to 200+ attendees.
Event
San Jose Tech Museum
Showcased our robot at one of the region's most vibrant innovation hubs. Our hands-on "fun-play" experience became a crowd favorite, engaging 500+ visitors.
Education
Stanford CAD Workshop
Partnered with a Stanford professor in radiation oncology to teach advanced CAD design to 60+ people, connecting top science communities with FIRST.
Sustainability
SustainPrint™ Initiative
We launched a filament recycling program to turn waste into possibility. Partnering with Stanford University's Department of Radiation Oncology and Maker Nexus, we built a bridge between cutting-edge research and the local STEM community.
100+ hours reprocessing 6.5kg+ of filament waste
Reproduced 20+ spools of high-quality recycled material
Several spools used to prototype our competition robot
Recycled 4 large boxes of waste from Maker Nexus makerspace
Learn more →
Mentorship
FLL Summer Camp → View Details
A 5-day full-time camp for 15 children (2nd–8th grade) new to robotics. Our comprehensive curriculum integrated STEM concepts, FIRST principles, and FLL fundamentals.
Average rating of 4.9/5 stars from anonymous survey
Raised $3,500 for team development
Most families expressed strong interest in FIRST programs
Hands-on building, coding, and problem-solving curriculum
Feedback
What parents are saying
My son Luke had such a great time last week! He learnt so much about robotics/coding knowledge. Is there any way my son can keep in touch with the Leviathan robotics team throughout the school year?
— Joyce Ho
My son thoroughly enjoyed the camp. It was a great mix of robotics, STEM, and playtime. Very impressed with the instructors at this age!
— Anonymous
I am extremely grateful for your patient teaching. We felt blessed to have enrolled Isaac into Leviathan Robotic camp.
— Jessie Liu
We truly thank you for all the activities this camp has offered. If you have future programs or activities, we would love to hear about them so she can join.
— Ariel Kuo
Global
International Outreach
Team members traveled to the Caribbean, Turkey, China, Japan, and Taiwan to spread the idea of FTC, reaching 50+ people from various backgrounds across 5 countries.
Hosting
FRC & FLL Partnerships
Hosted events connecting FRC teams with FLL families, bringing together diverse FIRST community members to strengthen the robotics ecosystem in our region.
Achievements
Our Journey of Excellence
From our founding in 2024 to competing at the highest levels — a timeline of milestones that define Leviathan Robotics.
5
Awards Won
2×
Alliance Captain
6-0
Best Qualifier Record
5
Countries Reached
Competition Awards
Recognition earned through engineering excellence, teamwork, and gracious professionalism.
NorCal Regionals 2026
Alliance Captain
Selected as alliance captain at Northern California Regionals, partnering with the Infinite Loop for an incredible playoff run showcasing teamwork and strategy at the highest level.
NorCal Regionals 2025
Judge's Choice Award
Honored for exceptional creativity, teamwork, and engineering excellence. Advanced through qualifiers to the elimination rounds against the region's best teams.
Santa Clara Qualifier
Inspire Award
Received the prestigious Inspire Award — the highest award in FTC — recognizing excellence across all aspects of the competition. Secured entry to NorCal Regionals with a 4-1 record.
Playspace 2 Qualifier
Winning Alliance Captain
Dominated with an undefeated 6-0 qualifying record and a 3-1 playoff run. Earned the Winning Alliance Captain award and qualified for regionals.
Playspace 1 Qualifier
Innovate Award
Our inaugural qualifier — allied with Team 19819 AstroBruins to advance to the finals. Earned the Innovate Award for creative engineering solutions.
Competition Timeline
Every match, every event — our complete competitive journey.
March 2026 — NorCal Regionals
Northern California Regional Championship
Selected as alliance captain. Partnered with the Infinite Loop for a powerful playoff run, executing complex strategies with precision in both autonomous and driver-controlled periods.
Early 2026 — Santa Clara Qualifier
Santa Clara High School Qualifier
Achieved a 4-1 qualifying record. Won the Inspire Award — the highest honor in FTC — securing our path to the NorCal Regional Championship.
February 2025 — Pre-Regionals Scrimmage
Hosted Practice Competition
Welcomed Cheesy Bytes, Kuriosity Robotics, and Quixilver for a pre-regionals scrimmage. Teams exchanged strategies and refined approaches before the big event.
December 2024 — Playspace 2 Qualifier
Playspace 2 FTC Competition
Undefeated 6-0 in qualifications, 3-1 in playoffs. Won the Winning Alliance Captain award and qualified for the regional championship.
November 2024 — Playspace 1 Qualifier
San Jose Robotics Tournament
Our inaugural qualifier at San Jose's Playspace. Allied with AstroBruins to reach the finals and won the Innovate Award for creative engineering.
June 2024 — Team Founded
Leviathan Robotics Established
FTC Team 25667 founded by students at Saratoga High School with a mission to innovate, compete, and inspire through robotics.
Outreach Milestones
Spreading the joy of STEM beyond the competition field.
🌎
Global Robotics Outreach
International robotics education initiative spanning the Caribbean, Japan, Taiwan, China, and Turkey — distributing educational materials and encouraging FIRST participation worldwide.
July 2024
🏫
Argonaut Elementary Science Fair
Showcased our robot and programming demonstrations to over 200 community members, encouraging young students to pursue STEM and sharing FIRST values.
April 2025
🏛️
San Jose Tech Museum
Interactive exhibit at one of the region's top innovation hubs. Over 500 visitors engaged with our robot and learned about STEM through hands-on demonstrations.
August 2025
🎓
CAD Classes with Stanford
Launched CAD education program for children featuring introductory and advanced sessions, with a Stanford University professor teaching design efficiency concepts.
November 2024
🤖
FLL Robotics Summer Camp
Five-day hands-on camp at Argonaut Elementary teaching robotics fundamentals, Lego building, programming, and STEM activities to elementary school students.
July 2024 & 2026
📣
FIRST Programs Presentation
Community presentation introducing FLL and FRC programs, featuring team members sharing experiences to inspire participation in STEM and robotics.
July 2024
Blog
Leviathan Robotics Blog
Welcome to the Leviathan Robotics blog! Here you will find exciting updates and insightful articles about our robotics club at Saratoga High School in Saratoga, California. Join us on our journey as we participate in the annual FIRST Tech Challenge (FTC) and spread the joy of robotics in our community.
Competition
Team 25667's Success at Northern California Regionals
Selected as alliance captain at NorCal Regionals, Team 25667 partnered with the Infinite Loop for an incredible playoff run showcasing teamwork and strategy.
Mar 10, 2026 • 1 min read
Season Recap
Team 25667 Leviathan Robotics at the FTC Decode Season: A Journey of Growth
A look back at our second qualifier at Santa Clara High School where we achieved four wins, one loss, and earned the prestigious Inspire Award.
Mar 9, 2026 • 1 min read
Competition
Team 25667's Inspiring Journey at the San Jose Robotics Tournament
Our inaugural qualifier at San Jose's Playspace, where we allied with Team 19819 AstroBruins to advance to the finals and earn the Innovate Award.
Mar 8, 2026 • 1 min read
Outreach
Leviathan Robotics: Engaging the Future of Innovation at the San Jose Tech Museum
Our August 2025 exhibition at the San Jose Tech Museum featuring an interactive fun-play robot experience that engaged 500+ visitors.
Feb 10, 2026 • 2 min read
Outreach
Leviathan Robotics at the Argonaut Elementary Science Fair: Inspiring Future Innovators
Showcasing our robot and programming demos to 200+ community members at the Argonaut Elementary School Science Fair.
Feb 10, 2026 • 2 min read
Award
Celebrating Our Success at the FTC Northern California Regionals
Advancing through qualifiers to elimination rounds and receiving the Judge's Choice Award for exceptional creativity, teamwork, and engineering.
Apr 20, 2025 • 2 min read
Scrimmage
Preparing for Regionals: A Successful Scrimmage with FTC Teams
Hosting Cheesy Bytes, Kuriosity Robotics, and Quixilver for a pre-regionals practice competition full of strategy sharing and learning.
Feb 20, 2025 • 1 min read
Competition
Victory at the Playspace 2 FTC Competition: A Journey to Regionals
An undefeated 6-0 qualifying record and Winning Alliance Captain award that secured our spot at the regional championship.
Dec 8, 2024 • 1 min read
Education
Empowering Young Minds: Multiple CAD Classes for Children
Introductory CAD classes for kids and an advanced session with a Stanford professor covering design efficiency and sustainability.
Nov 14, 2024 • 2 min read
Global
Global Outreach in Robotics: Inspiring the New Generation
International robotics education across the Caribbean, Japan, Taiwan, China, and Turkey, distributing materials and fostering FIRST awareness.
Jul 28, 2024 • 2 min read
Community
Empowering Communities Through FIRST Robotics Programs
Introducing FLL and FRC programs to the community through presentations featuring team members sharing their experiences and achievements.
Jul 17, 2024 • 1 min read
Summer Camp
Empowering Young Minds: Leviathan Robotics Summer Camp at Argonaut Elementary
Hands-on robotics outreach at Argonaut Elementary with Lego building, FLL game boards, and an introduction to the FIRST Tech Challenge.
Jul 16, 2024 • 2 min read
Team
Meet the FTC Team: Leviathan Robotics
Get to know our five founding members — Evan, Ethan, Vishak, Ambrose, and Luca — and their unique roles in coding, hardware, CAD, and communication.
Jun 12, 2024 • 2 min read
Summer Camp
FLL Robotics Summer Camp
A week-long program blending FIRST LEGO League robotics instruction with hands-on STEM activities. Mornings focus on FLL robotics, afternoons on exciting STEM experiments.
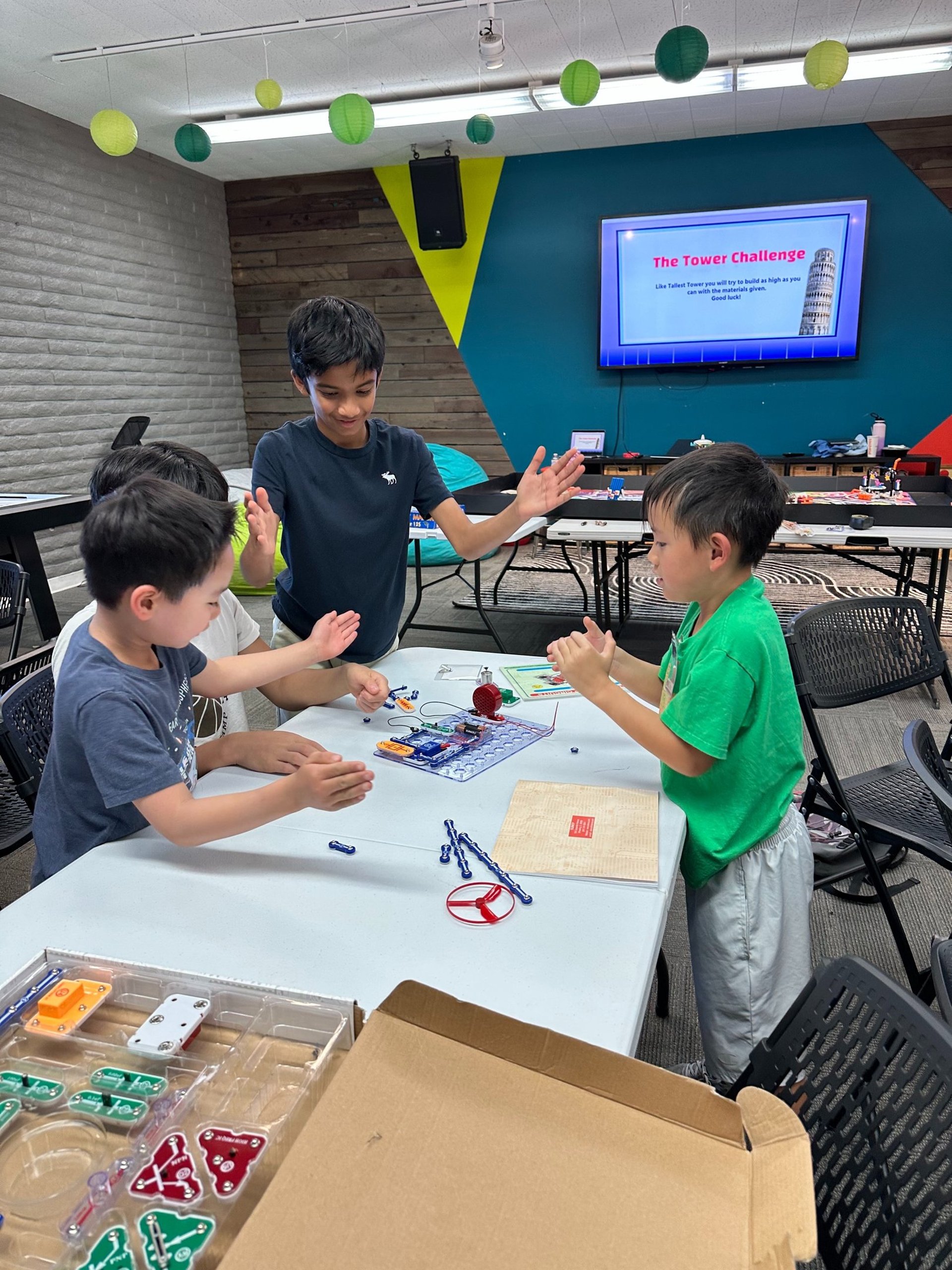
LEGO building challenges including tower construction, introduction to structural engineering concepts, and initial Generation Genius STEM kits.
Day 2 — FLL Concepts
Field Assembly & Competition Rules
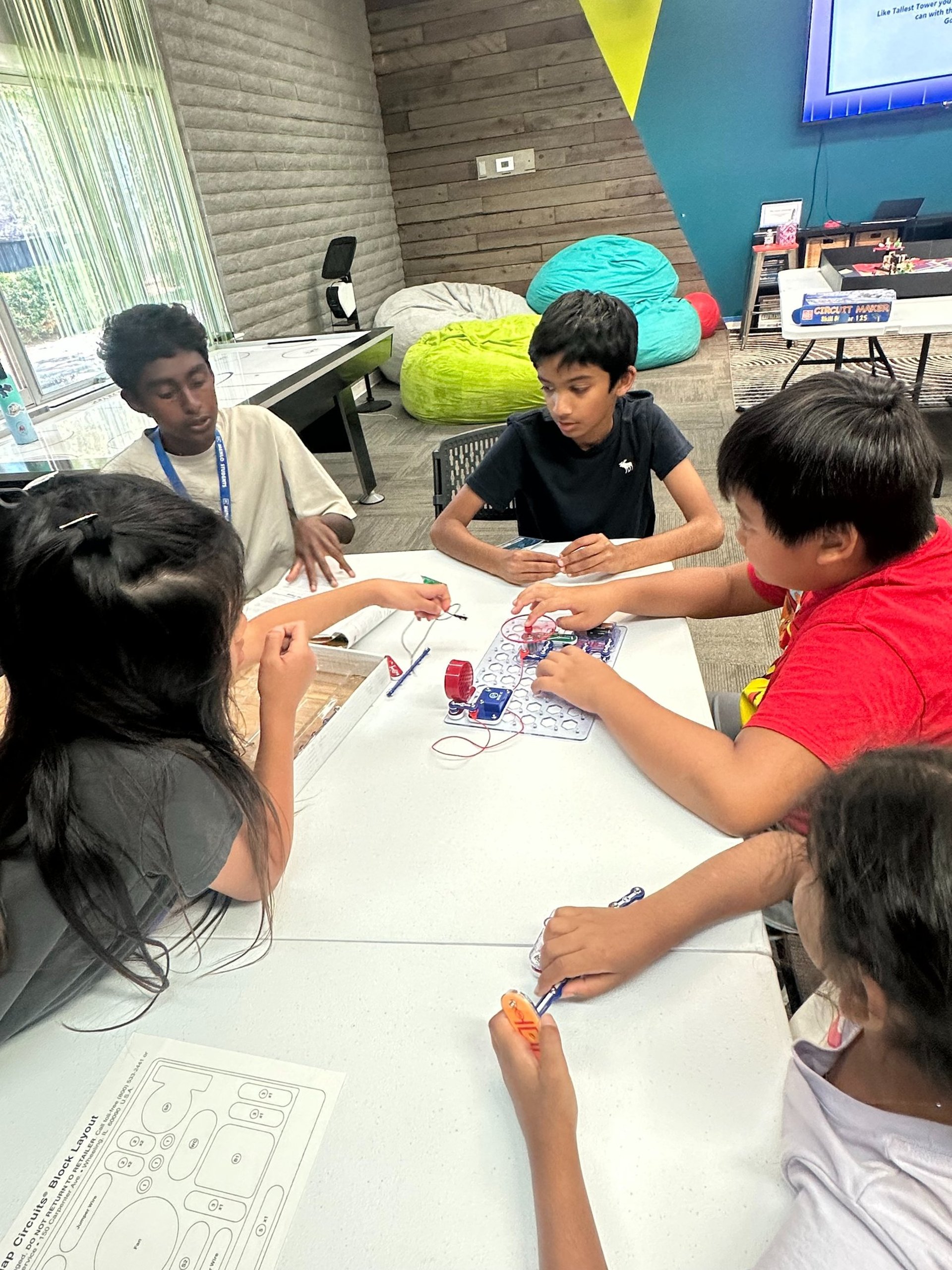
FLL field assembly, learning competition rules through trivia challenges. Afternoon activities include Snap Circuits, wind turbine models, and tower-building with spaghetti and marshmallows.
Day 3 — Advanced Robotics
Sensors & Competition-Ready Design
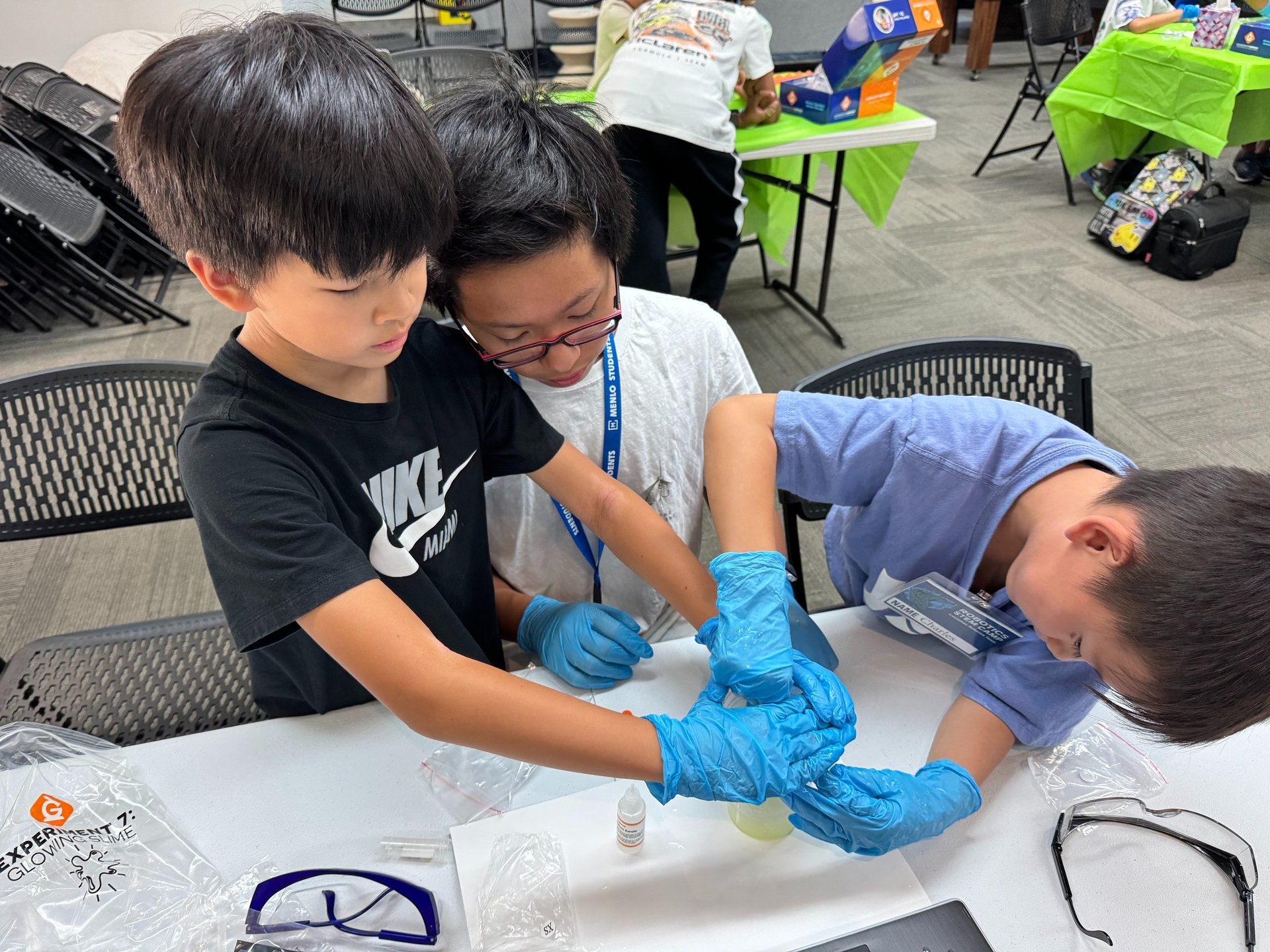
Introduction to light and touch sensors, competition-ready robot design sessions. Chemistry experiments including volcanoes and milk/food coloring demonstrations.
Day 4 — Coding & Competition Prep
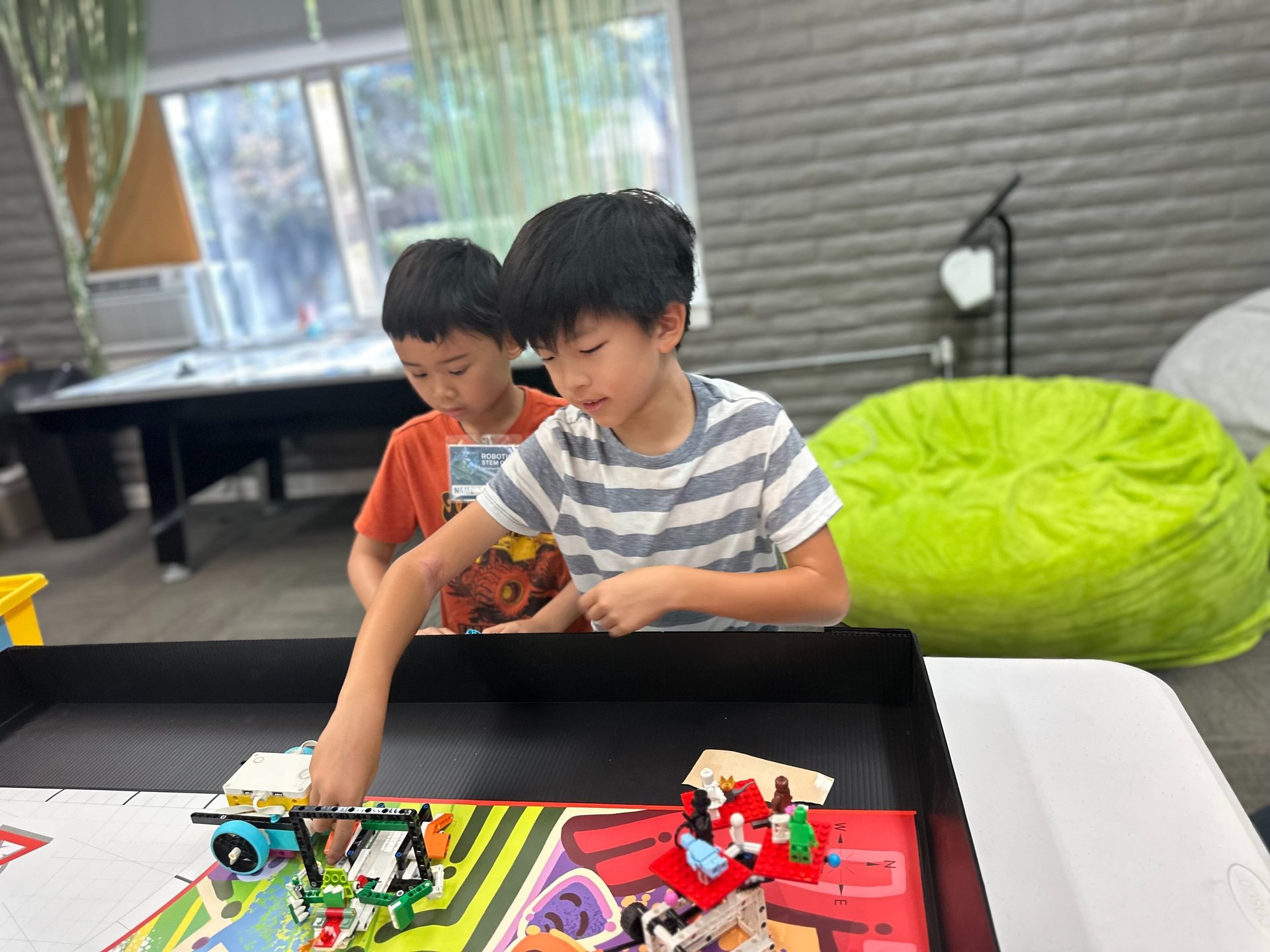
Spike Prime & Line-Following
Spike Prime coding app training, line-following programming challenges. Multiple STEM stations, pottery activities, and the Egg Drop Challenge.
Day 5 — Showcase & Celebration
Demo Competition & Closing
Robotics demonstration competition, refined Egg Drop finale, and closing celebration with snacks and socializing. Campers showcase everything they've built and learned.
Gallery
Camp Highlights
Outcomes
What Campers Learn
Engineering
Building & Design
Engineering principles, structural design, and hands-on construction with LEGO and other materials.
Coding
Programming Fundamentals
Spike Prime coding, line-following algorithms, and sensor-based programming for autonomous robots.
Teamwork
Collaboration & Problem-Solving
Working effectively in teams, adapting to challenges, creative problem-solving, and scientific reasoning.
Feedback
What parents are saying
My son Luke had such a great time last week! He learnt so much about robotics/coding knowledge. Is there any way my son can keep in touch with the Leviathan robotics team throughout the school year?
— Joyce Ho
My son thoroughly enjoyed the camp. It was a great mix of robotics, STEM, and playtime. Very impressed with the instructors at this age!
— Anonymous
I am extremely grateful for your patient teaching. We felt blessed to have enrolled Isaac into Leviathan Robotic camp.
— Jessie Liu
We truly thank you for all the activities this camp has offered. If you have future programs or activities, we would love to hear about them so she can join.
— Ariel Kuo
SustainPrint™
Recycling Filament, Reducing Waste
Turning 3D printing waste into high-quality recycled filament — proving that sustainability and performance go hand in hand.
100+
Hours Invested
6.5kg
Waste Reprocessed
20+
Spools Produced
1
Stanford Partnership
SustainPrint™
The Problem
Each year, robotics teams use tons of 3D printing filament for prototyping, creating significant plastic waste. Our team saw this as an opportunity to make a difference.
Waste Collection
Collecting Filament Waste
Robotics teams produce massive amounts of 3D printing waste through prototyping and iteration. Failed prints, support material, and outdated parts all end up in the trash. We collect this waste from local teams and sort it by material type — PLA and PETG — for proper recycling.
Sorted by material type: PLA and PETG bins
Collected from local robotics teams and makerspaces
Bags of waste filament sorted and prepared for processing
SustainPrint™
Our Solution
Last summer, we launched SustainPrint™ to recycle used filament and turn waste into possibility.
Recycling
The Filabot Extruder
Using a Filabot filament extruder, we shred, melt, and re-extrude waste plastic into brand new spools of usable filament. The process requires precise temperature control and careful monitoring to produce consistent, high-quality results.
Filabot extruder for professional-grade filament recycling
Precise temperature control at 185°C for optimal extrusion
Spooling system for clean, organized filament output
Over 6.5kg of waste reprocessed into 20+ spools
Process
Precision Extrusion
The extrusion process requires careful temperature management. Our team spent months experimenting and refining the process to achieve consistent filament diameter and quality, ensuring the recycled material performs as well as virgin filament.
Temperature controlled to within 1°C for consistent output
Multiple extrusion passes for improved quality
Diameter monitoring for print compatibility
SustainPrint™
Team Effort
Collaboration
Stanford Partnership
Partnering with the Department of Radiation Oncology at Stanford University, we built a bridge between cutting-edge research and the local STEM community, combining science, creativity, and environmental responsibility.
Partnership with Stanford's Department of Radiation Oncology
Connecting academic research with community STEM initiatives
Team members collaborating on recycling operations
SustainPrint™
The Results
Recycled filament used to prototype our own competition robot.
Output
Recycled Spools
Over the past few months, we've spent more than 100 hours experimenting, refining, and reprocessing filament waste — successfully reproducing over 20 spools of high-quality recycled material. Several of these spools were used to prototype our own competition robot, proving that sustainability and performance can go hand in hand.
20+ spools of recycled PLA and PETG filament produced
Used in our own robot prototyping and competition parts
Quality comparable to commercially produced filament
SustainPrint™
Gallery
Sorted Waste Collection
PLA and PETG waste sorted into labeled bins and bags, ready for recycling.
Raw Material
Collected 3D printing waste from robotics teams before processing.
Processing Station
Team members operating the shredder and extruder setup.